
型号LXPS-HS2210-R
工作距离mm300-900
分辨率1280*1024
视野范围0.8d*0.6d
采集时间s<0.3
Z轴精度mm1
尺寸mm205*80*53
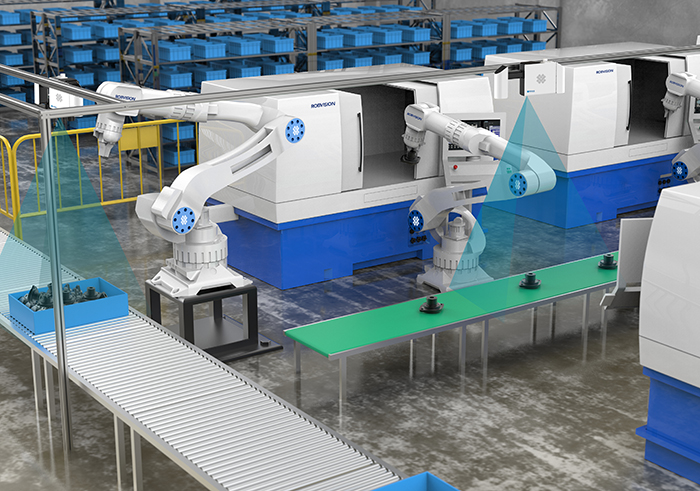
可以完成以下任务:多品种工件的机器人3D定位抓取上料
料框堆叠物体3D识别定位
复杂多面工件的柔性化3D定位抓取
大型物体3D定位抓取
工件的无序来料3D定位
多工序间机器人协作3D定位抓取
输送带上物体的快速3D定位抓取
喷涂机器人来料3D识别定位
大型设备的机器人装配3D定位
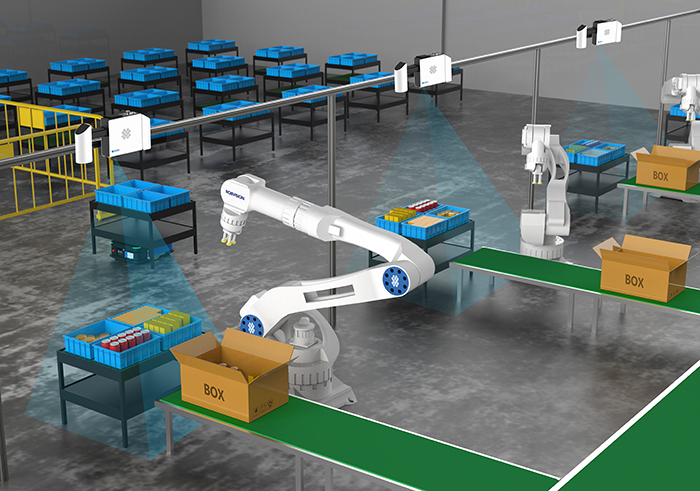
某快递公司的分拣中心,在进行包裹分拣时,快递员将收到的各种类的包裹(纸箱、邮件、软包)统一散乱堆放到分拣处,然后由人工逐个拾取放置到分拣输送带上。这种人工分拣方式效率低下,满足不了快递行业日益发展的快速要求。
技术分析:
方案要求实现无人化分拣流程
料框堆叠不同形状的袋装包装和盒包装无法用传统二维识别
包装形状各异,尺寸各异
人工拣选速度和质量受个人情绪等影响,较不稳定
人工 拣选多造成内部快件不确定损伤
解决方案:
通过机器人3D定位系统,引导机器人从包裹箱抓取包裹放置到传送带
通过3D视觉方案实现三维扫描定位
选用定制兼容型通用视野的产品型号
设用机器人设定抓取后扫描位置再放置到输送带
设定机器人轻拿轻放机制,确保拣选过程零损伤
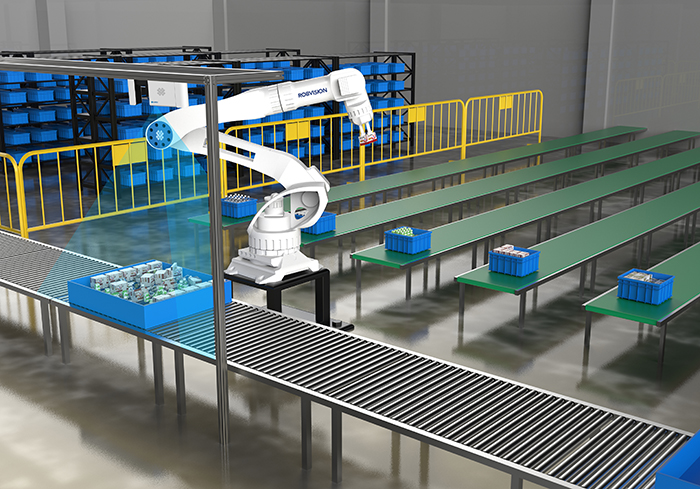
项目背景:某大型快递公司分拣线,每个工位使用人工从混合堆叠的快递包裹中拣选出来,并将有面单的一面朝上放置在传送带上。
技术分析:实现无人抓取、分类、面单识别
Ø混合包裹有箱子、软包、信封件
Ø需要对面单有无进行检测
Ø包裹上有黑色、反光胶带
解决方案:深度学习检测分类,3D识别定位引导机器人抓取
Ø通过深度学习对包裹检测识别分类、检测面单
Ø通过3D点云定位抓取中心
Ø通过运动旋转控制寻找侧面面单
常用的3D视觉技术包括:
n双目立体视觉和结构光
nToF (Time-of-Flight)
n激光三角测量法
每项技术根据不同的原理来记录三维信息,它们均有不同的优点和缺点。
杭州蓝芯科技自研的悟空系列3D视觉传感器具有高分辨率、高精度的特点,可以为客户提供可靠的彩、深度图和点云。空间分辨率达到230万像素,深度测量精度可达0.2mm。硬件上采用GPU加速,3D成像速度快可达0.4S。
石家庄3D视觉系统费用
